Robust Offset Free Model Predictive Control
Research Objective
Develop a new robust MPC theory that stabilizes a system with
a polytopic model uncertainty description.
- Add a tree trajectory to the regulator to simulate-varying
Uncertainties.

- Modify the controller formulation to include integral control
Offset free non-zero set tracking.
- Evaluate the closed-loop stability.
 The process models are Auto Regressive Moving Average EX-ogenous Inputs (ARMAX) polytopic models.
The state is defined as
The process models are Auto Regressive Moving Average EX-ogenous Inputs (ARMAX) polytopic models.
The state is defined as
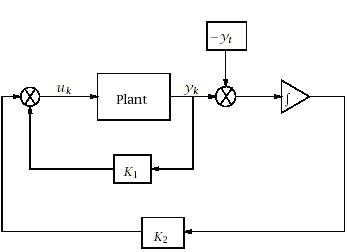
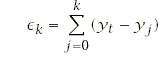
- Integral control is achieved by taking control action on
- K1 and K2 are the feedback gains on the extended state and EK resoectuvely.
Offset free integral control is achieved when

- Target calculation is unnecessary.
|


